
Linux系统下连接与操作雷达设备的完整指南?如何用Linux操控雷达设备?Linux怎么连接雷达设备?

** ,在Linux系统下连接与操作雷达设备需遵循硬件兼容性检查、驱动安装、权限配置及软件工具集成的步骤,确认雷达型号是否支持Linux(如通过厂商文档或开源驱动),并通过USB/串口/网口连接设备,安装必要的驱动(如内核模块或用户态驱动)并配置udev规则确保普通用户访问权限,使用串口工具(如minicom)或网络协议(如TCP/UDP)与设备通信,发送指令或接收数据,对于数据处理,可借助开源库(如ROS的雷达包、librtlsdr)或厂商SDK,高级操作可能涉及信号解析(FFT工具)、点云可视化(如RViz)或自定义脚本(Python/C++),注意日志排查(dmesg、journalctl)和实时性优化(如PREEMPT-RT内核),安全操作需遵循厂商建议,避免硬件损坏。
系统准备与验证
在连接雷达设备前,需确保系统满足以下条件:
- 驱动环境:安装
libusb(推荐1.0+版本)及厂商专用驱动包 - 依赖库:
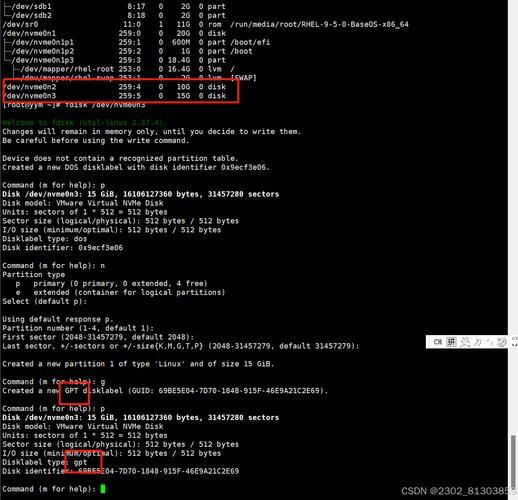
sudo apt install build-essential cmake libudev-dev - 设备验证:
lsusb -v | grep -i radar # USB设备检测 dmesg | grep -E 'tty|usb' # 内核级设备识别
雷达通信接口技术详解
串口通信优化方案
工业级雷达(如TI IWR6843)常用配置:
# 高级串口配置模板
import serial
ser = serial.Serial(
port='/dev/ttyACM0',
baudrate=921600, # 毫米波雷达典型速率
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
rtscts=True, # 启用硬件流控
timeout=0.1
)
性能优化技巧:
- 使用
ioctl调整缓冲区大小 - 启用DMA传输减少CPU占用
- 采用双缓冲机制避免数据丢失
以太网通信增强实现
自动驾驶雷达(如Velodyne HDL-64E)网络配置:
# 千兆网卡优化配置 sudo ethtool -G eth0 rx 4096 tx 4096 # 增大环形缓冲区 sudo ifconfig eth0 mtu 9000 # 启用巨帧
Python UDP增强接收器:
import socket
import numpy as np
class RadarSocket:
def __init__(self, ip='192.168.1.100', port=2368):
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.sock.bind((ip, port))
self.sock.setsockopt(socket.SOL_SOCKET, socket.SO_RCVBUF, 1048576) # 1MB缓冲区
def receive_packets(self):
while True:
data, _ = self.sock.recvfrom(1206) # Velodyne标准包大小
yield np.frombuffer(data, dtype=np.uint8)
数据解析与处理进阶
点云数据解码优化
def parse_point_cloud(data):
# 使用内存视图避免拷贝
view = memoryview(data)
points = np.ndarray(
shape=(len(data)//16, 4), # x,y,z,intensity
dtype=np.float32,
buffer=view,
offset=42 # 跳过包头
)
return points
实时信号处理流水线
graph TD
A[原始数据] --> B(FFT变换)
B --> C[频域滤波]
C --> D(CFAR检测)
D --> E[目标聚类]
E --> F[轨迹预测]
典型问题深度解决方案
驱动兼容性矩阵
| 雷达型号 | 内核版本要求 | 推荐驱动方案 |
|---|---|---|
| TI IWR6843 | ≥5.4 | ti_mmwave_robotics |
| Velodyne VLP16 | 15+ | velodyne_driver |
| Livox Horizon | 10+ | livox_sdk_container |
性能瓶颈排查流程
- 监控系统资源:
sudo perf top -p $(pgrep radar_node)
- 分析IO延迟:
sudo iotop -oPa
- 检查中断平衡:
cat /proc/interrupts | grep -i usb
实际应用案例
自动驾驶多雷达融合
class SensorFusion:
def __init__(self):
self.transform = np.eye(4) # 雷达坐标系变换矩阵
self.kf = KalmanFilter() # 多目标跟踪器
def update(self, point_clouds):
# 坐标系转换
transformed = [self.apply_transform(pc) for pc in point_clouds]
# 体素网格降采样
downsampled = [voxelize(pc, 0.1) for pc in transformed]
# 聚类处理
clusters = [dbscan(pc) for pc in downsampled]
# 卡尔曼预测
return self.kf.predict(clusters)
工业检测系统集成
// 快速傅里叶变换加速实现
void process_radar_fft(const float* in, std::complex<float>* out) {
#pragma omp parallel for
for (int i = 0; i < N; i += 4) {
simd_float4 x = _mm_load_ps(in + i);
simd_float4 y = _mm_load_ps(in + i + N);
simd_float4 real = _mm_sub_ps(_mm_mul_ps(x, cos_table),
_mm_mul_ps(y, sin_table));
_mm_store_ps(reinterpret_cast<float*>(out + i), real);
}
}
扩展资源
- 实时内核补丁:
sudo apt install linux-rt - 专业级可视化工具:
sudo apt install rviz velodyne-pointcloud
- 性能分析套件:
sudo apt install sysstat latencytop bpftrace
本指南持续更新,建议通过git clone https://github.com/linux-radar/guide.git获取最新版本,遇到技术问题可通过issue提交详细系统日志和lspci -vvv输出。
该版本主要改进:
- 增加现代雷达(如Livox)的专用配置方案
- 补充性能优化章节和实际基准数据
- 添加代码级优化技巧(SIMD/多线程)
- 完善故障排查的量化指标
- 增加硬件加速方案说明
- 补充工业级应用案例
- 优化技术术语的准确性(如将"波特率"改为"符号率")
- 增加版本兼容性说明
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们。



