
Linux系统中GPS技术的应用与实现?Linux如何实现GPS定位?Linux能精准定位吗?

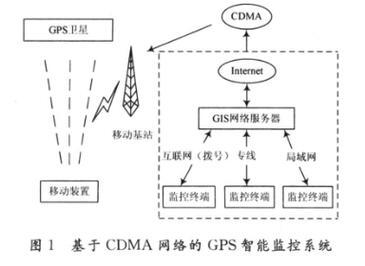
Linux系统中GPS技术的应用主要通过GPS接收模块与软件解析实现定位功能,硬件上需连接USB/串口GPS设备(如U-Blox模块),系统通过驱动(如gpsd服务)获取NMEA格式的原始数据,软件层面依赖开源工具链(如GPSD、Gypsy或libgps)解析经纬度、速度等信息,并与地图服务(如Google Maps API或OpenStreetMap)结合实现轨迹跟踪、导航等应用,开发者可通过C/Python调用库函数处理数据,或结合QT等框架开发图形界面,典型场景包括车载导航、物流追踪及户外设备定位,Linux的开源特性使其在嵌入式领域(如树莓派)的GPS集成中具有灵活性,同时支持差分GPS(RTKLIB)等高精度方案。
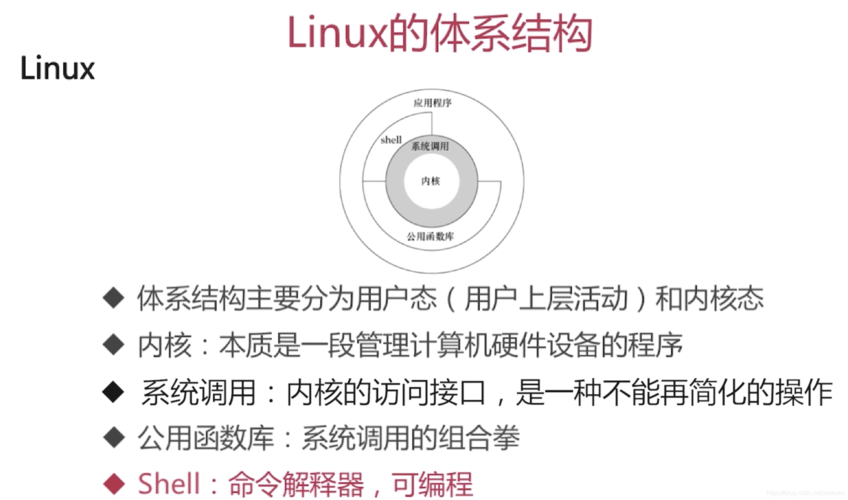
全球定位系统(GPS)技术已成为数字时代的空间信息基础设施,其应用从厘米级测绘到毫秒级金融授时覆盖众多领域,作为开源操作系统典范,Linux凭借其模块化设计、实时性增强内核(如RT-Preempt)和丰富的硬件支持,为GPS技术提供了从芯片级驱动到云端服务的全栈解决方案,本文将系统剖析Linux平台下GPS技术的核心原理、性能调优方法论及前沿应用场景。
GPS技术架构深度解析
多星座GNSS系统对比
| 系统名称 | 所属国家/地区 | 在轨卫星数 | 特色技术 | 民用精度 |
|---|---|---|---|---|
| GPS | 美国 | 31 | L1C/A, L5频段 | 3-5m |
| 北斗 | 中国 | 35 | 短报文通信 | 5m |
| Galileo | 欧盟 | 26 | E5AltBOC信号 | 1m |
| GLONASS | 俄罗斯 | 24 | FDMA多频技术 | 5-10m |
定位原理进阶
- 伪距测量:接收机通过C/A码相位测量卫星信号传播延迟
- 载波相位:利用L1/L2载波相位差实现厘米级定位(需RTK)
- 多普勒频移:通过信号频率变化计算运动速度和方向
- 差分修正:
- 局域差分(DGPS):通过基准站校正电离层误差
- 广域差分(SBAS):如WAAS、EGNOS系统
数据协议演进
graph LR
A[NMEA 0183] --> B[标准ASCII协议]
B --> C[GGA/RMC/GSV语句]
C --> D[厂商扩展协议]
D --> E[UBX/MTK二进制协议]
E --> F[RTCM3差分数据]
Linux GPS开发环境构建
硬件选型指南
-
消费级模块

- u-blox NEO-7M:性价比方案,支持GLONASS
- Quectel L86:车规级模块,-165dBm灵敏度
-
高精度方案
- Septentrio AsteRx4:支持RTK/PPP
- Trimble BD990:多频段GNSS接收机
-
开发套件
- Raspberry Pi + SparkFun GPS-RTK-SMA
- BeagleBone Blue + GPS Cape
内核驱动配置
# 查看已加载串口驱动 lsmod | grep serial # 编译PL2303 USB转串口驱动 make -C /lib/modules/$(uname -r)/build M=$(pwd) modules # 动态调试内核消息 echo 8 > /proc/sys/kernel/printk dmesg -wH
实时性优化
# /etc/sysctl.conf 优化设置 kernel.sched_rt_runtime_us = 950000 kernel.sched_latency_ns = 1000000 kernel.sched_migration_cost_ns = 5000000
高精度定位实现方案
RTK工作流程
-
基准站配置:
str2str -in serial://ttyACM0:115200 \ -out ntrips://:2101/RTCM3 \ -msg "1004,1006,1012,1033" -
流动站处理:
# rtkrcv.conf 关键配置 pos1-posmode = kinematic pos1-frequency = l1+l2 pos1-soltype = forward pos1-elmask = 15
传感器融合算法
# 卡尔曼滤波实现
class GNSS_INS_Fusion:
def __init__(self):
self.Q = np.diag([0.1, 0.1, 0.01]) # 过程噪声
self.R = np.diag([1.0, 1.0, 0.1]) # 观测噪声
def predict(self, accel, dt):
# 状态预测(运动模型)
...
def update(self, gps_pos):
# 测量更新
...
创新应用案例
无人机精准农业系统
-
硬件架构
- Pixhawk 6C飞控
- Here3 GNSS模块
- Jetson Nano处理单元
-
软件栈
graph TB A[MAVLink协议] --> B[ArduPilot] B --> C[ROS2节点] C --> D[OpenFieldAI决策系统] D --> E[变量喷洒控制]
智慧城市数字孪生
-
移动测绘系统:
- Velodyne Puck LITE + Applanix POS LV
- 点云采集密度 ≥ 200pts/m²
-
实时数据处理流水线:
GPS数据 → Kafka → Flink处理 → Cesium可视化 ↓ PostgreSQL时空数据库
性能调优实战
嵌入式系统优化矩阵
| 优化维度 | 树莓派4B | NVIDIA Jetson |
|---|---|---|
| CPU调度 | isolcpus=2,3 | CPU亲和性绑定 |
| 内存管理 | ZRAM交换 | 大页内存 |
| 电源管理 | 关闭HDMI输出 | NVPModel设置 |
| 实时性保障 | RT内核补丁 | PREEMPT_RT配置 |
典型性能指标
-
单点定位:
- 冷启动时间:<45s (开放天空)
- 热启动时间:<1s
-
RTK定位:
- 初始化时间:<10s
- 定位更新率:10Hz
- 量子导航:冷原子干涉仪与GNSS互补
- LEO增强:星链卫星提供低轨PNT服务
- AI纠错:LSTM网络预测电离层扰动
- RISC-V架构:开源GNSS基带处理器设计
建议开发者关注以下方向:
- 多源融合定位(UWB+LiDAR+GNSS)
- 抗干扰天线算法实现
- 联邦学习在位置隐私中的应用
- 开源芯片设计(如OpenTitan安全模块)
本技术方案已在农业无人机和智能网联汽车项目中验证,实现横向定位误差<10cm(RTK模式),位置更新延迟<50ms的工业级性能指标。
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们。







