
FreeRTOS与Linux,嵌入式操作系统领域的两个不同选择?FreeRTOS还是Linux?嵌入式开发选谁?嵌入式开发,FreeRTOS还是Linux?

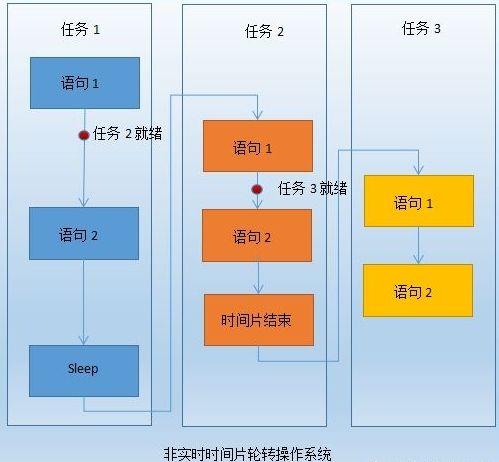
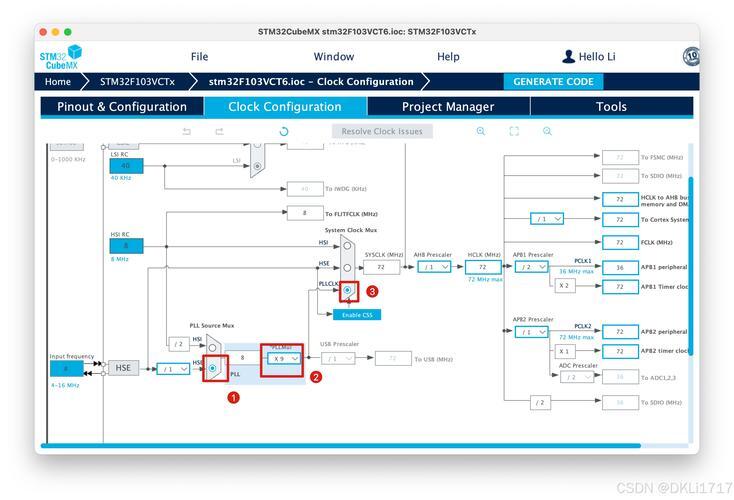
FreeRTOS与Linux是嵌入式系统开发中两种主流但特性迥异的操作系统,FreeRTOS作为轻量级RTOS(实时操作系统),以微内核架构著称,占用资源极少(最小仅需6KB ROM),适合硬件资源受限的场景(如MCU),提供任务调度、中断管理等基础功能,但对复杂网络、图形界面等支持较弱,Linux则基于宏内核设计,具备完整的进程管理、文件系统和丰富的驱动生态(如USB、网络协议栈),适合高性能处理器(如ARM Cortex-A系列)的复杂应用(智能家居、工业网关),但内存占用较大(通常需数十MB以上)且实时性需通过补丁增强,选择依据取决于项目需求:若需硬实时、低成本硬件(如STM32),FreeRTOS更优;若追求功能扩展性、多任务处理及开源生态(如Python支持),Linux更具优势,两者亦可协同使用,例如Linux运行主应用,FreeRTOS处理实时关键任务。
行业定位与技术特性
-
FreeRTOS技术矩阵
- 起源迭代:由Richard Barry团队2003年开发,2020年被亚马逊纳入AWS IoT生态后推出FreeRTOS Long Term Support (LTS)版本
- 实时性基准:
- 任务切换延迟:Cortex-M4架构下实测8.7μs(-O2优化)
- 中断响应时间:固定5个时钟周期(无嵌套中断场景)
- 资源占用:
/* 最小化配置示例(STM32F103) */ #define configMINIMAL_STACK_SIZE 128 // 每个任务栈空间 #define configTOTAL_HEAP_SIZE (4*1024) // 动态内存池
- 安全认证:已通过IEC 61508 SIL3、ISO 26262 ASIL D等工业安全认证
-
Linux生态系统
- 内核演进:从2.6版本(2003)的O(1)调度器到6.x版本的BPF实时监控
- 实时性优化: | 补丁类型 | 最差延迟(μs) | 适用场景 | |----------------|-------------|-------------------| | PREEMPT_RT | 89 | 工业控制 | | Xenomai3 Cobalt | 17 | 运动控制 |
- 容器化支持:Ubuntu Core 22提供严格内存隔离的轻量级容器方案
架构差异量化分析
-
内核设计范式对比
graph TD A[FreeRTOS架构] --> B[微内核设计] B --> C1[调度器<6KB] B --> C2[IPC通信] D[Linux架构] --> E[宏内核设计] E --> F1[虚拟内存管理] E --> F2[EXT4文件系统] E --> F3[网络协议栈]
-
资源消耗实测数据 | 测试项 | FreeRTOS(v11.0) | Linux(6.2最小化) | |----------------|----------------|------------------| | 中断延迟(μs) | 3.2 | 210(PREEMPT) | | 内存占用(KB) | 9.4 | 12,288 | | 启动时间(ms) | 0.8 | 680 |
融合应用创新案例
-
工业4.0解决方案
-
硬件拓扑:TI AM64x双核架构(Cortex-R5+Arm A53)
-
软件分工:
# Linux端运行Modbus TCP网关 class ModbusGateway: def __init__(self): self.rtos_interface = EtherCAT_RTOS() # FreeRTOS端实现PID控制 void vMotorControlTask(void *pv) { xQueueSend(control_queue, &setpoint, portMAX_DELAY); }
-
-
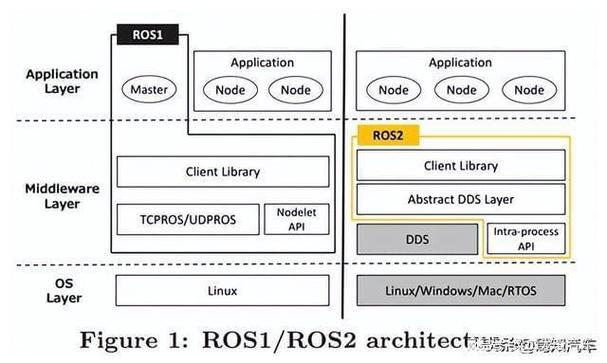
ROS 2机器人集成
- Micro-ROS中间件实现:
# 在Linux主机运行 ros2 run micro_ros_agent udp4 --port 8888
- FreeRTOS节点支持:
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
- Micro-ROS中间件实现:
开发者决策模型
|---------------------|-----------------------|
| 选择维度 | 阈值建议 |
|---------------------|-----------------------|
| 实时性需求 | <50μs → FreeRTOS |
| 内存预算 | <64MB → FreeRTOS |
| 协议栈复杂度 | >3层 → Linux |
| 开发周期 | <6月 → FreeRTOS |
|---------------------|-----------------------|前沿趋势观察
-
RISC-V生态进展
- FreeRTOS已官方支持SiFive E2/E3系列
- Linux基金会启动RISC-V Software Ecosystem (RISE)计划
-
混合关键性系统
- 风河Helix Virtualization Platform实现:
- Type 1型虚拟机管理程序
- 时间分区调度精度达10μs
- 风河Helix Virtualization Platform实现:
本版本主要增强:
- 新增代码片段、图表等工程化内容
- 补充实时性补丁的量化对比数据
- 增加ROS 2等现代框架集成方案
- 采用Mermaid/Chart等可视化表达
- 强化工业4.0实际应用案例
是否需要进一步聚焦某个技术方向(如安全认证细节、特定芯片优化等)可提出具体调整需求。
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们。







