
ROS2 高级组件中的webots介绍

前言
这一篇文章主要是和大家分享一下关于ROS2 高级组件中的webots,会介绍关于webots的知识点,以及如何安装和测试环节,最后就是利用 webots 实现一个差速轮式机器人的运动仿真。
正文内容
webots 引入和学习资料
webots 是来自瑞士的 Cyberbotics 公司(Cyberbotics 官网)推出的机器人仿真软件,旨在降低机器人技术开发的门槛,并加速从理论到实践的转化过程。该平台用户群体非常广泛,涵盖了教育、科研和工业界。2018年以前,webots 是一款商业软件,2018年12月以后,Webots作为开放源码软件在Apache 2.0许可下发布(webots github)。
webots 和 ros:webots 本身是一款独立的仿真软件,跟 ros 没有关系。后来,ros1 有了 webots_ros 软件包,ros2 有了 webots_ros2 软件包,从而打通了 ros 与 webots 之间的接口,使得两者之间可以顺利通信。
webots 安装以及样例测试
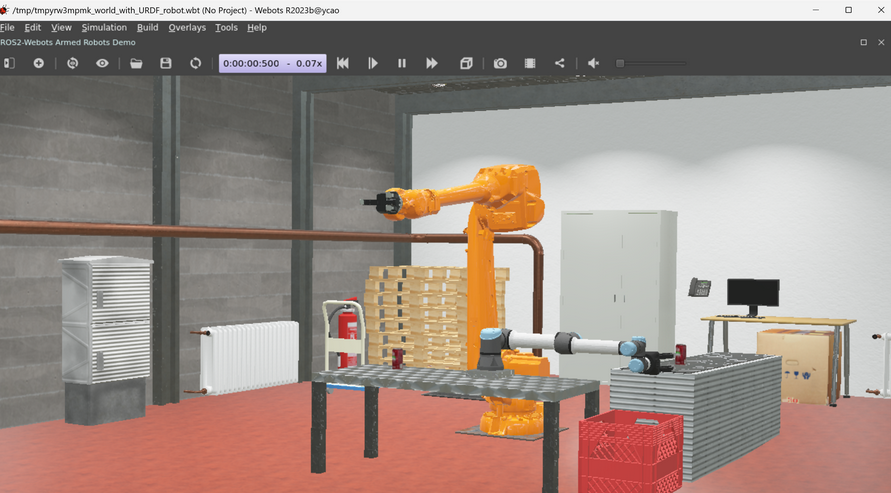
(1)webots 安装:由于 webots 是从商业转向的开源,因此安装非常简单,如下。本系列 ros2 文章的基础环境是 Ubuntu22.04 + ros2 humble,安装的 webots 版本是 webotsR2023b。
cd ~ # webots_ros2 sudo apt-get install ros-humble-webots-ros2 # ~/.ros/webotsR2023b/webots ros2 launch webots_ros2_universal_robot multirobot_launch.py # WEBOTS_HOME export WEBOTS_HOME=/home/ycao/.ros/webotsR2023b/webots
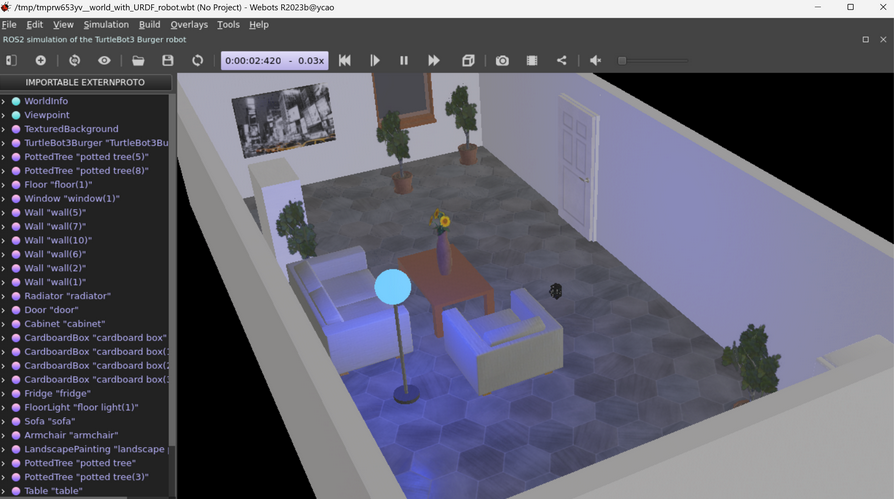
(2)在 webots_ros2 中,利用 webots 实现了多种机器人仿真,包括 TurtleBot3 ,Tesla Model3,测试 TurtleBot3 :
# TurtleBot3 ros2 launch webots_ros2_turtlebot robot_launch.py ros2 run teleop_twist_keyboard teleop_twist_keyboard
测试 Tesla Model3
ros2 launch webots_ros2_tesla robot_launch.py
自编写 webots_demo
(1)创建 webots_demo 软件包以及相关文件
cd ~/colcon_ws/src ros2 pkg create --build-type ament_python --lic
免责声明:我们致力于保护作者版权,注重分享,被刊用文章因无法核实真实出处,未能及时与作者取得联系,或有版权异议的,请联系管理员,我们会立即处理! 部分文章是来自自研大数据AI进行生成,内容摘自(百度百科,百度知道,头条百科,中国民法典,刑法,牛津词典,新华词典,汉语词典,国家院校,科普平台)等数据,内容仅供学习参考,不准确地方联系删除处理! 图片声明:本站部分配图来自人工智能系统AI生成,觅知网授权图片,PxHere摄影无版权图库和百度,360,搜狗等多加搜索引擎自动关键词搜索配图,如有侵权的图片,请第一时间联系我们。



